
Description from the time:
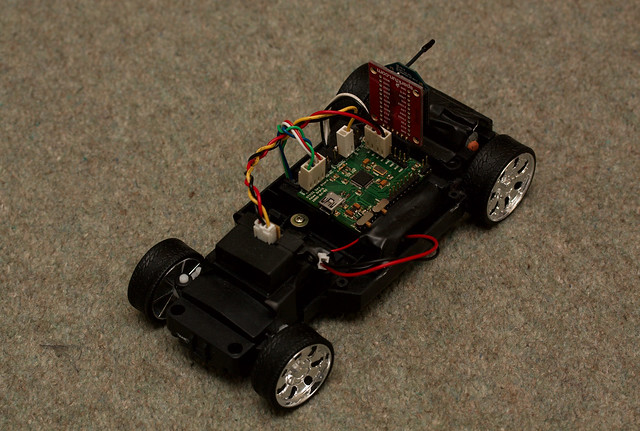
Robot3 has an IR rangefinder, one of my STM32 development boards and an xbee radio running the new ZB firmware. There’s also a small motor controller board hidden inside the old battery compartment as well as a 900mAh lipo. The rear two wheels are driven by one motor which is speed controlled by a PWM output from the STM32, while the front two have another motor on a rack and pinion that steers them and is driven by a simple high or low signal from the STM32.
The car can be manually remote controlled over the xbee wireless link but automatically backs away from detected obstacles. Alternatively it can simply drive forwards until it detects an obstacle, then reverse away.